
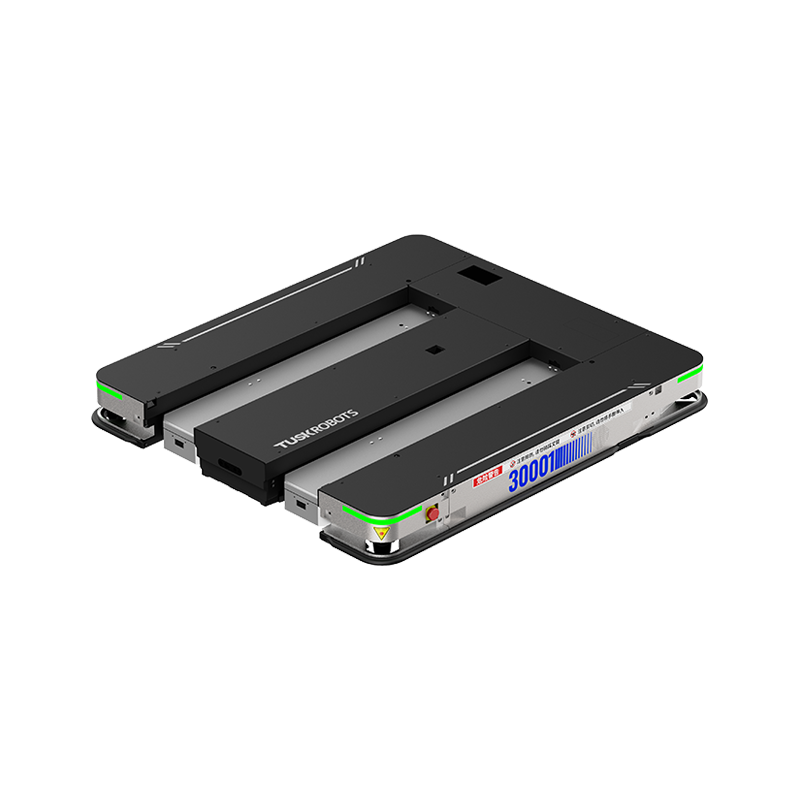

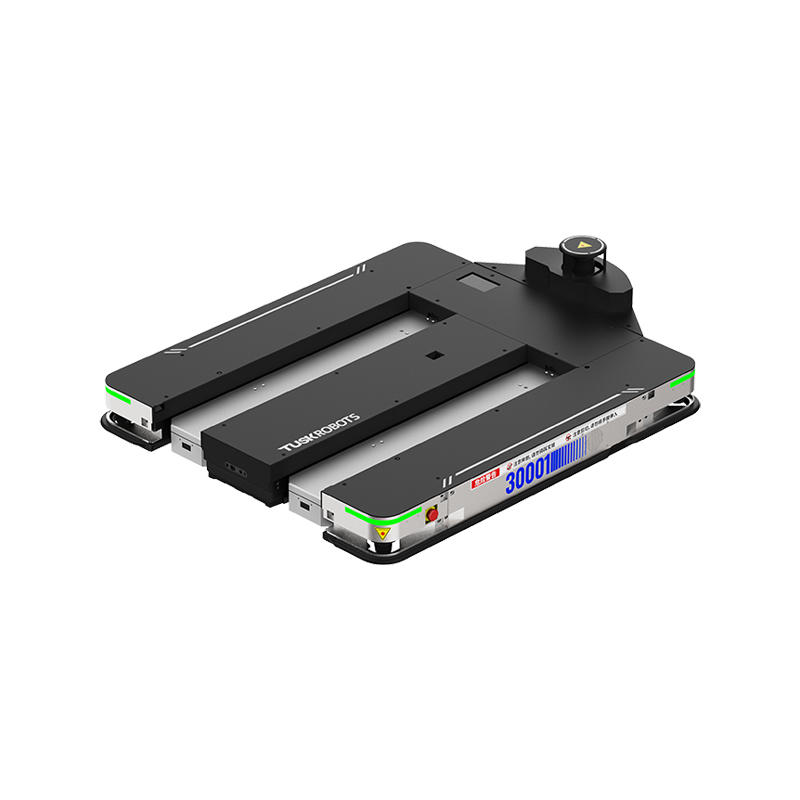

| プロジェクト | 仕様 | E10(タイタン) | E10-SLAM(タイタン) |
| 基本パラメータ | サイズ(mm) | 1233x1102x170 (保護ストリップを含む) | 1399x1102x170 (SLAM コンポーネントは昇格可能) |
| 最大吊り上げ重量(kg) | 定格1200KG、最大1500KG | ||
| 自重(kg) | 310 | 320 | |
| フォーク高さ (mm) | 90(負荷時下向き浮上高さ7mm) | ||
| フォーク伸び限界(mm) | 1400 | ||
| 最大揚程(mm) | ≤330 | ||
| 表示画面 | 5インチ | ||
| 通信モード | デフォルトのWIFIバージョン:デュアルバンド2.4G/5G、IEEE802.11b/g/nをサポート(-5Gバージョンは5G通信をサポート) | ||
| 安全保護 | 障害物回避保護 | フロントダブルレーザーセンサー リアダブルレーザーセンサー | |
| フロントレーザーの検出距離(m) | 0-3 | ||
| 機械的保護 | 非常停止ボタン、リセットボタン、車体全体の保護ストリップ | ||
| 注意機能 | 音声・光電アラーム機能付き | ||
| フォークチップの保護 | 光電センサー検出距離≤100mm、衝突スイッチ | ||
| 動き 能力 | ナビゲーションモード | DMコード | SLAM DMコード デュアルナビゲーション |
| 最高速度(全負荷/空負荷)(m/s) | 1.5/1.2 | ||
| 定格加速度(m/s²) | 1 | ||
| 停止精度 | ±5mm/±1° | ±10mm/±2° | |
| 移動モード | デュアルホイールディファレンシャル | ||
| 地盤適応ギャップスロープステップ | 40mm(ギャップ)/4°(7%)(スロープ)/15mm(ステップ) | ||
| フォークの伸長が最大に達したときの最大傾斜 | 2° | ||
| リチウム電池の性能 | 定格電圧・容量 | 51.2V/30AH | |
| バッテリー寿命 | フル充電回数:1500回(電池容量は新品時の70%以上を保証) | ||
| バッテリー持続時間/充電時間 | ≧6H/≦1.5H | ||
| バッテリーのタイプミス | LFP | ||
| 環境 | 使用温度(℃) | 0~45 | |
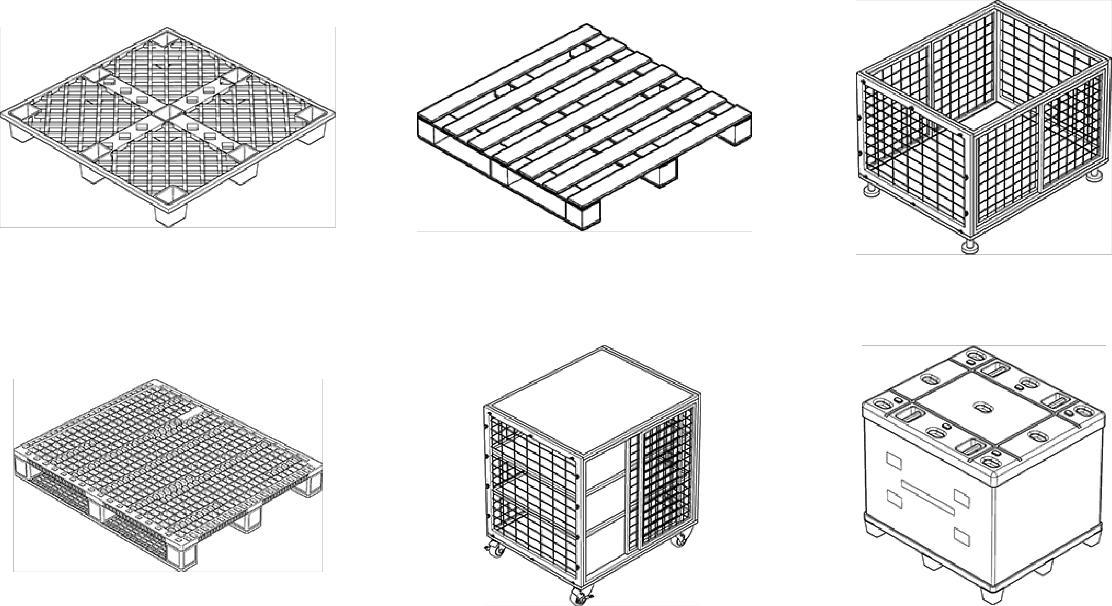
| パレット 要件 | W1 と W2 の幅 (mm) | W1≦190。 700≦W2≦950 | |
| パレット長さ(mm) | ≤1400 | ≤1300 | |
| パレット開口部高さ(mm) | 120-130 | ||
|
仕様
|
パラメーター
|
Types
|
|
|
内幅
スロット W1 (ミリメートル)
|
W1≤160
|
 |
|
|
スロットの外幅 W2 (mm)
|
W2≥600
|
||
|
インナーパレット
高さ H(ミリメートル)
|
95≤H≤130
|
||
|
パレットの長さ
長さ(ミリメートル)
|
≤1400(DMコード版)
|
≤1300 (SLAM バージョン)
|
|
 |
|||
当社は多くの特許資格と名誉賞を受賞しています.
最新の企業および業界ニュースを提供します。
はい、 産業処理ロボット 負荷条件に基づいて、速度またはパスを動的に調整できます。計量センサー、フォース/トルクセンサーなど、ロボットに装備されているセンサーは、輸送されたオブジェ...
続きを読む産業処理ロボット 実際、加速をランダムに調整できますが、通常、調整はプリセットパラメーター範囲内で実行され、特定の運用基準と安全ガイドラインへの順守が必要です。 アクセラレーシ...
続きを読む産業処理ロボット いつでもオブジェクトが傾いたり逸脱したりするオブジェクトを検出する機能を持っています。この機能の実装は、主にロボット内の複数のセンサーと高度な制御システムの統合に依...
続きを読むTuske(CEバージョン)パレットロボット マルチセンサー融合アーキテクチャ、ダイナミックパスプランニングアルゴリズム、および機械式ソフトウェアのデュアル冗長性設計を通じて、「長距...
続きを読むTuske(CEバージョン)パレットロボット PLDレベルの安全アーキテクチャ設計と長期的なバッテリーシステムを通じて、リスクの高い操作シナリオのための一連のすべての天候の安全保護シ...
続きを読む マーケティング部メールアドレス
マーケティング部メールアドレスmarketing @tuskrobots.com
 人事部メールアドレス
人事部メールアドレスhr @tuskrobots.com
製品・ソリューションに関するお問い合わせ info @tuskrobots.com
 お問い合わせ
お問い合わせ +86-400-8808-310
スマート ファクトリーとスマート ロジスティクスを強化し、取り扱いをより簡単かつ効率的にします。






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어


















-1.jpg?imageView2/2/format/jp2)
.jpg?imageView2/2/format/jp2)
.jpg?imageView2/2/format/jp2)



.jpg?imageView2/2/format/jp2)

