


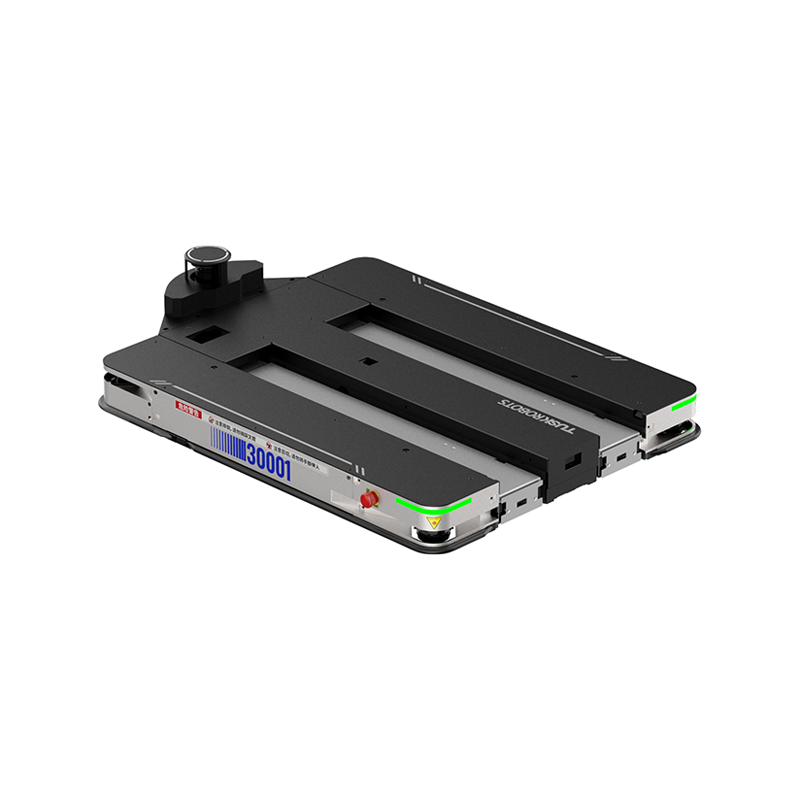

| プロジェクト | 仕様 | タスクE(CE版) | タスクES-H(CE版) |
| 基本パラメータ | サイズ(mm) | 1312x1060x170 | 1479x1060x295 (SLAM コンポーネントは昇格可能) |
| 最大吊り上げ重量(kg) | 800 | ||
| 自重(kg) | 310 | 340 | |
| フォーク高さ (mm) | 90(負荷時下向き浮上高さ7mm) | ||
| フォーク伸び限界(mm) | 1400 | ||
| 最大揚程(mm) | ≤330 | ||
| 表示画面 | 5インチ | ||
| 通信モード | デュアルバンド2.4G/5Gをサポート | ||
| 安全保護 | 障害物回避保護 | フロントダブルレーザーセンサー リアダブルレーザーセンサー | |
| フロントレーザーの検出距離(m) | 0-3 | ||
| 機械的保護 | 非常停止ボタン、リセットボタン、車体全体の保護ストリップ | ||
| 注意機能 | 音声・光電アラーム機能付き | ||
| フォークチップの保護 | 光電センサー検出距離≤100mm、衝突スイッチ | ||
| セキュリティレベル | PLd | ||
| 動き 能力 | ナビゲーションモード | DMコード | SLAM DMコード デュアルナビゲーション |
| 最高速度(全負荷/空負荷)(m/s) | 1.5/1.2 | ||
| 定格加速度(m/s²) | 1 | ||
| 停止精度 | ±5mm/±1° | 土20mm/±2° | |
| 移動モード | 二輪ディファレンシャル | ||
| 地盤適応ギャップスロープステップ | 40mm(ギャップ)/4°(7%)(スロープ)/15mm(ステップ) | ||
| フォークの伸長が最大に達したときの最大傾斜 | 2° | ||
| リチウム電池の性能 | 定格電圧・容量 | 51.2V/30AH | |
| バッテリー寿命 | フル充電回数:1500回(電池容量は新品時の70%以上を保証) | ||
| バッテリー持続時間/充電時間 | ≧8時間/≦2時間 | ||
| 電池のタイプ | LFP | ||
| 環境 | 使用温度(℃) | 0~45 | |
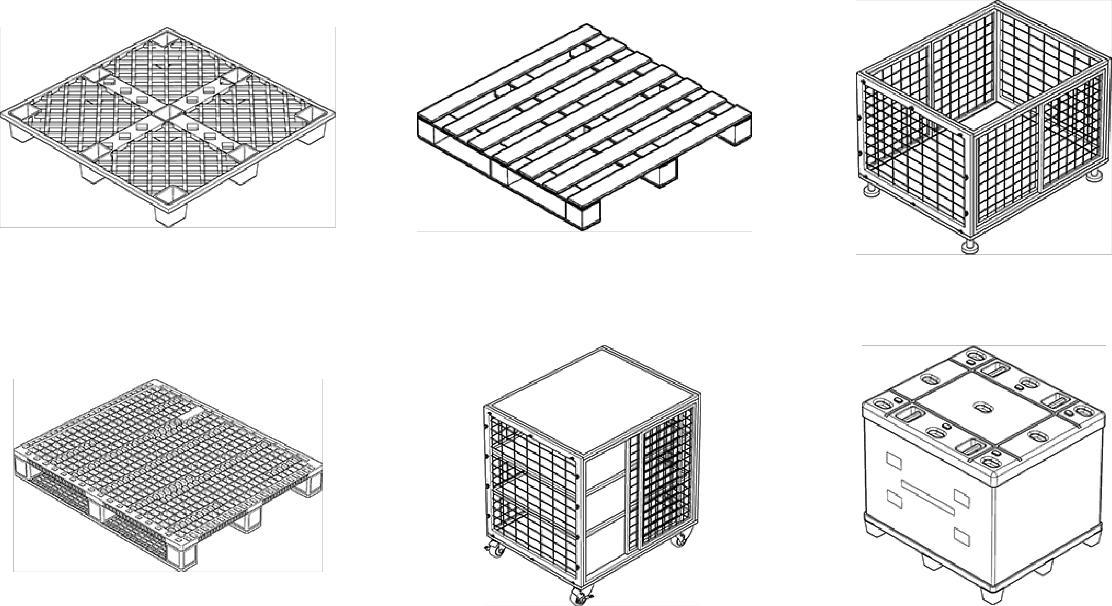
| パレット 要件 | W1とW2の幅(mm) | W1≦160、600≦W2≦900 | |
| パレット長さ(mm) | ≤1400 | ≤1300 | |
| パレット開口部高さ(mm) | 95-130 | ||
|
仕様
|
パラメーター
|
Types
|
|
|
内幅
スロット W1 (ミリメートル)
|
W1≤160
|
 |
|
|
スロットの外幅 W2 (mm)
|
W2≥600
|
||
|
インナーパレット
高さ H(ミリメートル)
|
95≤H≤130
|
||
|
パレットの長さ
長さ(ミリメートル)
|
≤1400(DMコード版)
|
≤1300 (SLAM バージョン)
|
|
 |
|||
当社は多くの特許資格と名誉賞を受賞しています.
最新の企業および業界ニュースを提供します。
産業処理ロボット オブジェクトの形状と方向を認識し、宇宙の姿勢を正確に見つけることができます。この能力は、次のポイントで詳細に説明されます。 1。形状認識: ...
続きを読む産業処理ロボット オブジェクトの回転角をリアルタイムで追跡できます。この技術は通常、視覚センサー、加速度計、ジャイロスコープ、力/トルクセンサーなどのセンサーシステムに依存しています...
続きを読むはい、 産業処理ロボット オブジェクトの画像と深さ情報をキャプチャできます。これは通常、RGBカメラ、3Dカメラ、構造化された光センサー、LIDAR、またはステレオビジョンシステム...
続きを読むはい、 産業処理ロボット 重量情報に基づいて正確なソートを実行できます。統合された力/トルクセンサーまたは計量システムを通じて、ロボットはオブジェクトの取り扱いと輸送中に、正確な重...
続きを読むはい、 産業処理ロボット 取り扱いプロセス中にリアルタイムで計量できます。これは通常、ロボットの握り端または腕の端に力/トルクセンサーを統合することによって達成されます。これらのセ...
続きを読む マーケティング部メールアドレス
マーケティング部メールアドレスmarketing @tuskrobots.com
 人事部メールアドレス
人事部メールアドレスhr @tuskrobots.com
製品・ソリューションに関するお問い合わせ info @tuskrobots.com
 お問い合わせ
お問い合わせ +86-400-8808-310
スマート ファクトリーとスマート ロジスティクスを強化し、取り扱いをより簡単かつ効率的にします。






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어


















-1.jpg?imageView2/2/format/jp2)
.jpg?imageView2/2/format/jp2)
.jpg?imageView2/2/format/jp2)




.jpg?imageView2/2/format/jp2)
